

Настройка Klipper для Delta (Predator SKR1.4 Turbo + 2209 UART)

Пока ничего не забыл хочу поделиться историей успешного "переезда" со стока на SKR 1.4 + 2209 и Klipper. Также укажу цены на момент приобретения и ссылки откуда брал .
Вначале по железу - была приобретена плата SKR 1,4 Turbo за 1536р. (https://www.aliexpress.com/item/BIGTREETECH-SKR-V1-4-Control-Board-BTT-SKR-V1-4-Turbo-32-Bit-WIFI-3D-Printer/4000470048293.html?spm=a2g0s.12269583.0.0.6eb072a0X1Y04i) , я брал отдельно только плату посчитал что драйвера 2209 можно купить дешевле не у них.
TMC 2209 брал 4шт по 271р. (https://www.aliexpress.com/item/1PC-Stepstick-TMC2208-TMC2209-driver-Stepper-Motor-Super-Silent-With-New-Heat-Sinks-Replace-For-SKR/32996989207.html?spm=a2g0s.12269583.0.0.394c545fqi0kfD), они не с красной а с зеленой частью и нет разьемов для хоуминга, но по UART работают без проблем и без каких-либо доработок.
Многие советуют покупать сразу по 1 ссылке плату и драйвера, так они точно будут совместимы. Но кто хочет рискнуть и сьэкономить ссылку я дал)
Далее, нужно подготовить разьемы. Важный момент - надо инвертировать разьёмы стопов, поменять местами - в "стоке" идёт белый красный желтый (сверху вниз) цвета, а для SKR 1.4 надо желтый красный белый. ") Можно либо использовать разьемы XH2.54 (например такой комплект стоит всего 120р. https://aliexpress.ru/item/32831666806.html?spm=a2g0s.9042311.0.0.274233edeGJxCJ) , либо аккуратно отжав переставить (что сделал я , так как комплект штекеров ещё не пришёл). Также подключение датчика и вентилятора будет понятно по фото - датчик надо также обжать в двойной разьём и вставить в Probe (правее Servo), тройной разьём вентиляторов хоттенда переобжать в два двойных разьёма и подключить в разьёмы вентиляторов (по картинке 3 = 2+1). Так, и по разьёмам двигателей и стопов - главное не перепутать порядок, надо чтоб подключены двигатели были в разьёмы :
Можно либо использовать разьемы XH2.54 (например такой комплект стоит всего 120р. https://aliexpress.ru/item/32831666806.html?spm=a2g0s.9042311.0.0.274233edeGJxCJ) , либо аккуратно отжав переставить (что сделал я , так как комплект штекеров ещё не пришёл). Также подключение датчика и вентилятора будет понятно по фото - датчик надо также обжать в двойной разьём и вставить в Probe (правее Servo), тройной разьём вентиляторов хоттенда переобжать в два двойных разьёма и подключить в разьёмы вентиляторов (по картинке 3 = 2+1). Так, и по разьёмам двигателей и стопов - главное не перепутать порядок, надо чтоб подключены двигатели были в разьёмы :
Z
X Y
(между Х и У экран). Если перепутать, то деталь будет повернута. Также в том-же порядке подключаем стопы, если перепутать то при парковке башни будут ехать дальше. Далее опишу команды для проверок.
Так, на этом часть по подключению закончена, пора переходить к прошивке и настройке Klipper.
Я использовал Raspberry Pi 3b+ , на которую ранее по инструкциям установил Octoprint и Klipper, это очень просто - скачиваешь образ с сайта https://octopi.octoprint.org/latest (на текущий момент 0.17.0), далее по той-же инструкции - на флешку записать образ, найти в корне файл octopi-wpa-supplicant.txt и прописать свои параметры Wifi (если по WIFI связь будет) вставить флешку в Pi, подождать пока она загрузится. Далее через SSH (я использовал Putty) подключиться к ней (IP адрес можно увидеть и настроить чтоб он не менялся через меню своего роутера). По умолчанию Pi пользователь пароль raspberry. Далее, у вас должен открыть по IP адресу октопринт.
Переходим к Klipper. Также всё по инструкции - (https://www.klipper3d.org/) всё достаточно просто :
через SSH также вводим команду :
git clone https://github.com/KevinOConnor/klipper
./klipper/scripts/install-octopi.sh
(можно прям копировать и правой кнопкой если Putty). После скачивания и установки вводим :
cd ~/klipper/
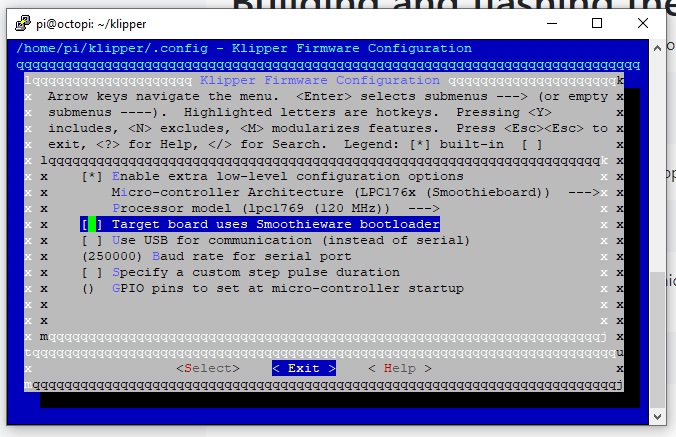
make menuconfig
откроется меню Klipper, надо выбрать свой контроллер (для SKR 1.4 Turbo выбрать LPC 17xx, далее LPC 1769 для Turbo). Всё, после нажать в терминале make. Прошивка соберётся и создастся файл ~/klipper/out/klipper.bin
")
Его надо записать на флешку, вставить флешку в SKR 1.4 и включить. Через некоторое время надо перезапустить плату. Если всё хорошо, то у файла поменяется расширение на CUR.
Вот уже готовая прошивка , можно помещать (она по идее для любой платы на SKR 1.4 подойдёт, потому что все настройки храняться на Pi а не на плате.) Можно скачать и прошиться. BIN файл Klipper
Далее, надо подключить по USB Pi и SKR 1.4 и ввести команду
ls /dev/serial/by-id/*
в ответ высветится название вашего порта, его нужно вписать в дальнейшем в настройки Klipper на pi.
Далее, открываем через IP свой Octoprint. Надо зайти в меню плагинов и добавить OctoKlipper.
") Далее вводим в настройках соединения /tmp/printer, а в меню OctoKlipper в разделе
Klipper Configuration заполнить порт (
Далее вводим в настройках соединения /tmp/printer, а в меню OctoKlipper в разделе
Klipper Configuration заполнить порт (
[mcu]
serial: /dev/serial/by-id/usb-Klipper_lpc1769_0E40010928813AAF9A766A5CC02000F5-if00
это например как было у меня)
Также на этом этапе можно ввести конфиг клиппера : вот он в текстовом виде, можно просто скопировать и вставить :
Описание параметров можно посмотреть на странице Klipper, думаю итак всё понятно. Также можете поменять ток двигателей (у меня отлично печатает с 1.1в при 3000 ускорениях и скорости движения я поставил 300, печатаю если надо качественно - 60-80мм/с, если надо быстрее - до 150мм/с пробовал пропусков нет всё справляется.)
Далее, пора переходить к калибровке Delta. Опишу порядок действий, который мне подсказали, он кажется самым простым, быстрым и рабочим.
1. Надо проверить что всё подключено как надо, по первых проверяем концевики . Это можно сделать просто визуально, они горят красным когда не нажаты, и перестают гореть когда нажаты. Также важно порядок : вводим команду в терминале
QUERY_ENDSTOPS , она выдаст состояние концевиков. Советую сверится чтоб всё было на своём месте - нажимаем концевик А (это слева если смотреть на экран, должен быть подключен в разьём X-stop.) Смотрим по команде QUERY_ENDSTOPS чтоб он был Triggered а остальные Open . Аналогично B (он справа от экрана) и С (он по середине). Если всё нормально пробуем запарковаться. G28 в терминале или через меню движений значек домика. На этом этапе надо быть очень внимательным - если что-то подключено не правильно то башня не остановиться тогда надо отключить питание и проверить ещё раз подключение. Если всё приехало и остановилось можно продолжать.
2. Проверяем датчик стола, важный момент - надо для него включить в прошивке резистор
[probe] pin: ^P0.10
я не располагал такой инструкцией и "сломал" его, пришлось перепаивать от компьютерной мышки кнопу, но она работает вполне хорошо. ")
датчик проверяется командой в терминале : Query_probe , причём должно быть в не нажатом состоянии Open , а при нажатии - Triggered. Если у вас наоборот надо добавить инверсию (pin: ^!P0.10)
3. Концевики работают, датчик работает. Приступаем к собственно калибровкам.
Вначале командой G28 потом PROBE_CALIBRATE делаем калибровку высоты , надеваем датчик и ждём. Медленно эффектор опустится до нажатия кнопки и далее выведет на экран что надо командами TESTZ Z=0.1 (подставить значение в мм куда ехать, если надо ниже ставим с минумом, выше - с плюсом.) Если у вас стандартынй датчик то где-то на TESTZ Z=-16 можно смело ехать, далее по 1мм и потом по 0.1мм. Добиваемся того чтоб листок бумаги начинал "закусываться", но должен легко двигаться под соплом. Когда эта позиция найдена пишем Accept в терминал, далее сохраняем настройки как подсказывает терминал (SAVE_CONFIG). Важно запомнить, что все калибровки должны заканчиваться сохранением параметров, после этого идёт перезагрузка Klippera с новыми параметрами.
4. Следующий этап : команда DELTA_CALIBRATE. Также одеваем датчик и ждём пока принтер сам не померяет (помоему в 7 точках).
После как обычно сохраняем параметры.
5. Далее идёт калибровка неровностей стола : команда BED_MESH_CALIBRATE . Если вы используете мой конфиг я там добавил количество точек для точности, их аж 81 , плюс интерполяция ещё 3 точек. Но у меня это занимает несколько минут и всё автоматически.
Далее также сохранение.
На этом этапе можно через плагин Bed Visualizer посмотреть свой стол))) Вот такую картинку ")
В принципе это основные калибровки, можно ещё расширенную сделать по инструкции (https://github.com/KevinOConnor/klipper/blob/master/docs/Delta_Calibrate.md).
Ещё интересную картинку можно посмотреть в меню Klipper, показывает загрузку.
")
6. Для этого надо скачать модель, распечатать PLA на небольшой скорости (рекомендуют 40мм/с). И измерив внести данные в терминал, инструкция очень подробная думаю пояснять тут не надо.
У меня получилось :
DELTA_ANALYZE CENTER_DISTS=73.9,74.1,73.8,73.9,74,73.9
DELTA_ANALYZE OUTER_DISTS=73.8,73.9,74,73.8,73.9,74.1
DELTA_ANALYZE CENTER_PILLAR_WIDTHS=8.9,9.0,8.9
DELTA_ANALYZE OUTER_PILLAR_WIDTHS=8.9,8.9,8.9,9.0,9.0,9.0
DELTA_ANALYZE SCALE=1.0
DELTA_ANALYZE CALIBRATE=extended
после рассчётов мне выдало
stepper_a: position_endstop: 456.115841 angle: 209.747118 arm: 438.979057
stepper_b: position_endstop: 454.999369 angle: 329.565829 arm: 442.540743
stepper_c: position_endstop: 453.251072 angle: 90.000000 arm: 441.623826
delta_radius: 227.300406
Тоесть, длинны тяг у меня от 439 до 442.5мм примерно, высота башен он 453 до 456мм. Разброс 2-3мм(
Осталось разобраться с https://www.klipper3d.org/Pressure_Advance.html , параметры внёс но пока что-то разницы особой не заметил.
Выводы : если знать что делать то перенастройка займёт совсем немного времени.
Далее, 2209 греются посильнее чем стоковые, я переставил вентилятор прям к ним и после печати всю ночь пропусков нет всё работает стабильно. Какие я заметил выводы :
Во первых благодаря тонкой настройке неровностей стола первый слой намного лучше ложиться, с одинаковой толщиной по всему столу. На родной прошивке изменяется 49 точек (по 7 в окружности), и у меня несмотря на то что несколько раз перекалибровывался в некторых местах было видно что толщина первого слоя разная.
Во вторых - так называемой эффект "лососёвая кожа", он прошёл. Чуть позже выложу примеры, пока на белом PLA печатал кубики на фото это сложно передать, выложу фото ваз другим цветом как допечатается.
В третьих - появилась возможность всё настроить "под себя" - убрал датчик филамента - с ним во первых крайне сложно печатать TPU , идёт лишний прижим, во вторых неудобно что может образоваться "петля" или запутаться вокруг него филламент. Да и руками когда без него намного легче крутиться катушка. Также как упомянул поднял со стоковых 1100 до 3000 ускорения, на родных драйверах при попытке даже 1200 поставить уже бывали пропуски и смещение слоёв, а сейчас всё работает. Также скорость перемещений поставил 300, в стоке 150.
Ещё вроде послесловия напишу полезные команды :
sudo apt-get update && sudo apt-get upgrade - поставить обновления
DUMP_TMC stepper=stepper_a - проверка драйверов UART
QUERY_ENDSTOPS - проверка концевиков
Query_probe - проверка датчика стола (Probe)
PROBE_ACCURACY - проверить "повторяемость" датчика стола
PID_CALIBRATE HEATER=extruder TARGET=220 - калибровка PID Экструдера, поставить свою "частую" температуру
PID_CALIBRATE HEATER=heater_bed TARGET=60 - калибровка PID Стола, аналогично.
Не забываем сохранять параметры командой SAVE_CONFIG .
Повторяемость моего "датчика" с кнопкой от мышки в разных участках стола :
probe accuracy results: maximum 13.059707, minimum 13.047211, range 0.012496, average 13.056739, median 13.058145, standard deviation 0.003310
probe accuracy results: maximum 13.015415, minimum 13.013853, range 0.001562, average 13.014790, median 13.015415, standard deviation 0.000765
probe accuracy results: maximum 13.059550, minimum 13.053302, range 0.006248, average 13.058144, median 13.057988, standard deviation 0.001774
Повторюсь, точность меня устраивает и ловить сотки я не собираюсь.
Вот ещё модель, Крепление SKR 1.4 которая подходит для крепления SRK 1.4 - разработчик мой основной советчик Дмитрий (http://t.me/Mutumbik) .
P.s. хочу выразить огромную благодарность Дмитрию (http://t.me/Mutumbik) , его каналу по Predator Канал Predator Telegram, а также каналу Секта любителей дельты, они помогли с возникшими ошибками и подсказали где что почитать что сделать.
Еще больше интересных статей
Печать 4-мя сменными соплами в массы! Часть 1.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Работа над реализацией печа...
350х350х500. Чертежи и модели.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Мини лазерный гравер на деталях от DVD приводов и сканеров, с рабочей зоной 100х100 мм
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
Комментарии и вопросы
тут можно скачать https://3dt...
это уже выбор страждущих, захо...
Не только у таких. Даже у ручн...
Всем привет! Проблема известна...
Всем привет! Решил я закрыть с...
Доброго всем дня, проблема так...
При печати начал появляться вы...