

Второй винт оси "z" для Ender-3

При переделке Ender-3 с боуден на директ, по моему мнению, требуется установить второй винт оси "z".
Кому не интересны рассуждения, то переходите сразу к части 2.
Часть 1 – "Теоретическая".
Для начала посмотрел готовые решения. Предлагаю их рассмотреть.
1. Комплект с шаговым двигателем. Например такой.

2. Без шагового двигателя, с ремнем синхронизации. Например такой.

3. С использованием печатных деталей, без шагового двигателя, с ремнем синхронизации. Винт с трапецеидальной резьбой (далее Т-винт) закреплен в одном фланцевом или опорном (на лапах) подшипнике. Например такой.

4. С использованием печатных деталей, без шагового двигателя с ремнем синхронизации. Т-винт закреплен между двух подшипников. Например такой.

Все эти решения ИМХО имеют некоторые проблемы.
Решение 1 использует два шаговых двигателя без ремня синхронизации, а это решение проблемное. Владельцы Anet хорошо об этом знают. Установка одновременно второго двигателя и ремня синхронизации на Ender-3, на мой взгляд, бессмысленна.
Решения 2, 3 и 4 фиксируют Т-винт в трех точках, а значит, с большой долей вероятности, будет воблинг.
Решения 1 и 2 стоят дороже, чем мне бы хотелось. К тому же очевидно, что можно сделать дешевле и уж точно не хуже.
Решения 2 и 3 имеет консольное закрепление шкивов, а значит нормальный натяг ремня будет сделать невозможно. При натяжении ремня Т-винт будет изгибать.
Решение 4 самое оптимальное с точки зрения закрепления шкивов ремня синхронизации, но как указано выше - возможен воблинг. Плюс к этому печать и постобработка деталей для этой модернизации усложнена (очистка от поддержек углублений для подшипников не самое приятное занятие).
Далее необходимо сформулировать требования к техническим решениям для второго винта оси "z":
1. Шкивы синхронизации должны быть закреплены между двух подшипников. Подшипники должны располагаться в непосредственной близости от шкивов (как в примере 4).
2. Возможность регулировки подшипникового узла в горизонтальной плоскости (как в примере 3). Устраняем возможные проблемы с воблингом.
3. Стоимость минимальная.
4. Попытаться избежать фиксации Т-винта в трех точках.
В результате нехитрого моделирования получилось следующее:

Крепление левого (если смотреть спереди) Т-винта:

Зеленым цветом печатное крепление. Красным цветом печатные распорные шайбы, толщиной 2 мм. Фаска на шайбе направлена в сторону подшипника.
Крепление правого Т-винта и двигателя:

Сделал три отверстия для крепления двигателя, но смог закрутить только два винта. Не убирать же теперь отверстие)) Все остальные конструктивные особенности такие же, как и на креплении левого Т-винта.
Натяжитель ремня:

Прорезь сделал под шпули с внутренним диаметром 5 мм, но у меня оставались подшипники F688zz, поэтому сделал переходную втулку и использовал их.
Вторая каретка портала "x":

В кронштейне Т-гайки сделал две степени свободы (можно перемещать в двух плоскостях). В каретке есть углубления под гайки М3 с обратной стороны, предназначенные для крепления кронштейна Т-гайки.
Крепление блока питания:

Для крепления блока питания необходимо просверлить отверстия d4,5-5 мм в пластиковой детали (резьба на блоке питания уже есть.). Сверху блока питания сделал кронштейн для инструмента, но для моих нужд он слегка заходит в область печати. На thingiverse видел решения по переносу блока в другие места.
Подведу краткий итог части 1:
1. Шкивы ремня синхронизации закреплены между двух подшипников.
2. Обеспечена возможность регулировки креплений Т-винтов в горизонтальной плоскости в небольшом диапазоне 1-2 мм.
3. Минимальный набор комплектующих.
4. Т-винты фиксируются в двух точках (на креплении Т-винта и на Т-гайке). Данный пункт действует если переносить двигатель наверх.
Часть 2. – Практическая.
Для сборки необходимы следующие комплектующие (буду давать ссылки на алиэкспресс, где приобретал сам, не реклама, не реферал):
1. Т-винт d8 мм Pitch 2mm Lead 8mm, длина 350 мм.
2. Ремень кольцевой зубчатый 2GT-6 мм, длина 610 мм.
3. Шкив зубчатый 2GT - 2 шт. 20 teeth bore 8 (20 зубцов, отверстие 8 мм).
4. Подшипник фланцевый F688zz (8х16х5) - 10 шт. Взамен 10 шт можно купить 5 шт и паразитный шкив с внутренним диаметром 5 мм, выйдет дешевле.
5. Крепеж. Не считал. Просто брал из коробочки. Если необходимо, то напишите - посчитаю.
6. Провода. Около 4 м 24AWG (использовал провода в ПВХ изоляции для аудиосистем 0,25 кв.мм).
7. Клеммы PH2.0. У себя пока не использовал, а удлинил имеющийся провод. Заказал тут. Когда привезут переделаю данное безобразие. Могут понадобиться разъемы 6 пин - такие.
Пункт 6, 7 если переносить двигатель наверх.
Стоимость основного комплекта (позиции 1-4) 10-15$.
Распечатал почти все из черного ABS, но можно использовать PETG. Из PETG распечатал кронштейн для инструмента. При печати креплений Т-винтов желательно поставить поддержки в отверстиях под подшипники. В остальных местах по усмотрению. Печатал слоем 0,2.
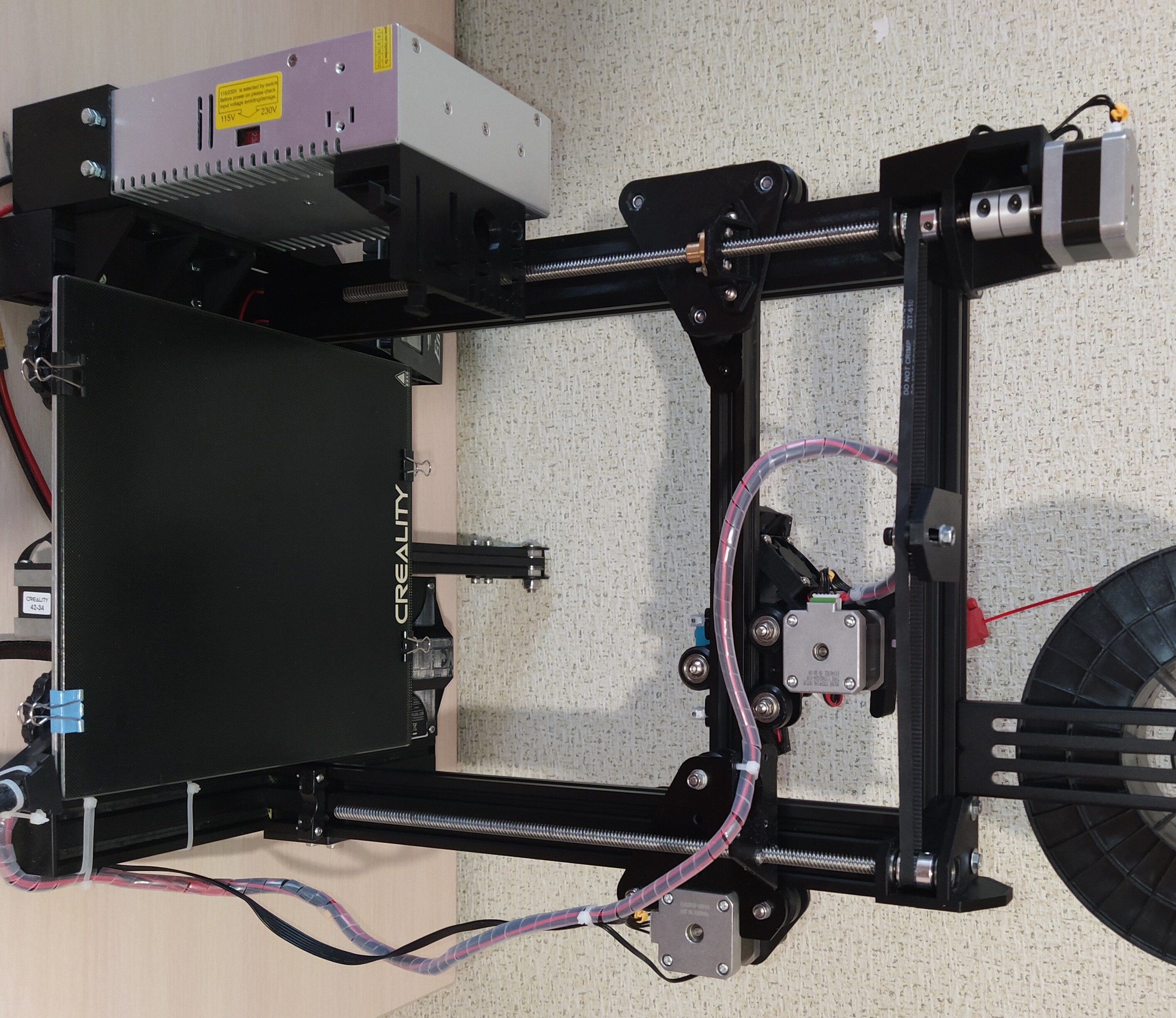
Вот что получилось:


При сборке креплений левого и правого винта необходимо на наждачной бумаге или камне подправить высоту распорных шайб. Шайбы с фаской. Стирать обязательно с большей стороны (без фаски). Сторона с фаской для упора в подшипники. Все детали должны входить с небольшим усилием. Изначально размер всех деталей больше чем необходимо на 0,4 мм.

Предварительную сборку и подгонку я проводил без ремня. В качестве оси вращения использовал канцелярский скальпель. Можно использовать болт М8.

Когда левое и правое крепления собраны, то можно приступать к установке всего этого на принтер.

Пред установкой необходимо отключить принтер и снять блок питания. Установить вторую каретку портала "x" (используются штатные гайки и винты). Поставить Т-гайку и второй Т-винт.
Отдельно необходимо указать на следующее. Если Вы не хотите переносить шаговый двигатель наверх, то можно его оставить снизу (на проектном месте), но это потребует тщательной настройки левого крепления Т-винта. В таком случае ведущий винт будет закреплен в трех точках.
Перед затяжкой болтов на креплении левого и правого Т-винта необходимо поднять портал оси x до упора вверх. После этого закрутить болты креплений. Необходимо следить за тем, чтобы Т-винты были вертикальны в обеих плоскостях. Обратите внимание на расстояние от винта до плоскости рамы принтера – они должны быть одинаковы на всей высоте.
Далее ставим муфту и двигатель на предназначенное место. Двигатель пока не подключаем.
Выравниваем портал в горизонт. Я делал это с помощью штангенциркуля относительно верхней балки.

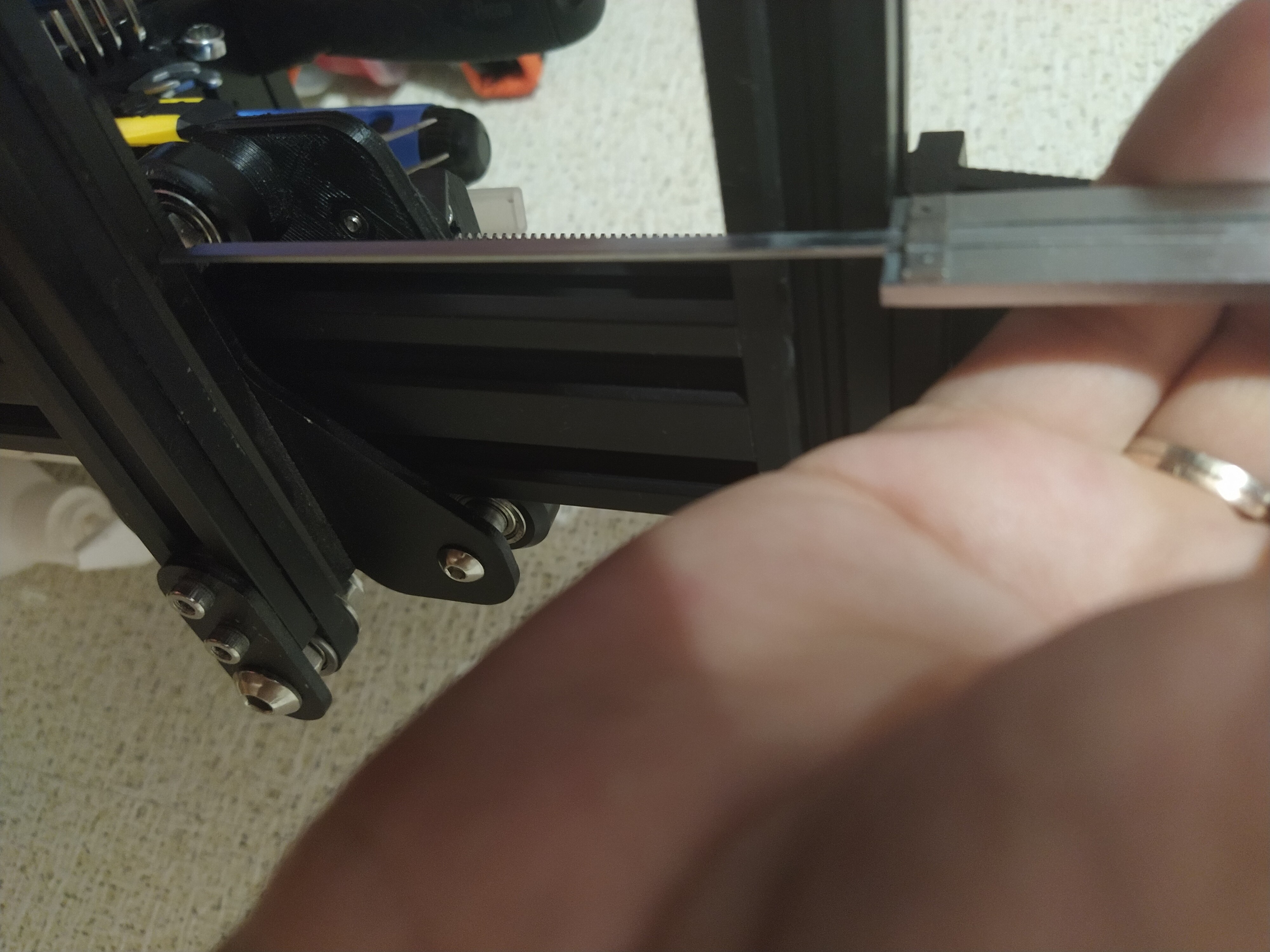
Затягиваем винты на шкивах.
Устанавливаем натяжитель ремня.
Проверяем отключен ли шаговый двигатель. Как бы чего не вышло - ослабляем муфту на шаговом двигателе. Поднимаем портал оси x на самый верх, после чего надавливаем по центру на портал, чтобы он опустился вниз (возможно надо будет смазать Т-винты). Когда портал опускается - смотрим на биение винтов в двух плоскостях. Регулировкой положения креплений и Т-гаек добиваемся минимального биения. Биение будет, так как все винты немного не ровные, в том числе штатный от Ender-3. Написанное в этом абзаце ИМХО. Я не проверял, что будет, если не убрать биение винта, но рисковать не стану.
Для прокладки проводов до двигателя предлагаю воспользоваться такими заглушками на профиль. И провода проложить в одном или двух каналах вертикального профиля. При нарезке лучше увеличить ширину заглушки на 1-2% - так она плотнее будет защелкиваться в паз. У себя увеличивал на 2%.
Если переносите шаговый двигатель наверх, то необходимо инвертировать вращение оси "z". Как это сделать читайте на портале. Например тут.
В правом креплении предусмотрены отверстия для кабельной стяжки. За них можно закрепить провод.

Далее фото печати серым пластиком ABS. На мой взгляд: на сером пластике лучше всего видны проблемы печати. Как видно есть некоторые косяки печати (с этим я сейчас разбираюсь), но воблинга среди них нет.

Еще одна деталь из ABS. Печатал тоже со вторым винтом на оси "z" по такой же схеме, но шаговый двигатель был снизу. Воблинга нет.

Кронштейн для инструмента из PETG.

Выложил детали на портал. Каждой детали нужно распечатать по одному экземпляру, кроме шайбы дистанционной (Ring.STL) – их нужно 6 штук (4 для установки, 2 на случай если «промахнетесь»).
П.С. Если что-то не подходит, то воспользуйтесь надфилем.
Еще больше интересных статей
Система автоматической смены столов Chitu Systems PlateCycler C1M для Bambu Lab A1 mini
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Замена керамического нагревателя в 3D принтере QIDI X Plus 4 (франкенштейн)
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Не происходил нагрев. Датчик...
Цветная печать двумя хотэндами с сервоприводом
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Пару месяцев назад я решил, что мне жизненно необходимо научить свою...









{kind=link}
{kind=link}
{kind=link}
Комментарии и вопросы
То что пишет ИИ - тянет на шаб...
Конечно, я приглядел 7.5л буты...
Если красить достаточно часто,...
Как максимально просто и легко...
Здравствуйте, уважаемые коллег...
Коллеги кто ни будь менял валы...
Всем привет недавно купил новы...