

Подключение TMC2209 в UART режиме к ARDUINO+RAMPS1.6+ на Klipper

Рассказал товарищу в чатике достаточно подробно, решил, может будет кому ещё полезно.
Если баян, сильно не пинате, маякните и я удалю пост.
Дано: Принтер CoreXY Мозги ARDUINO+RAMPS 1.6 PLUS Драйвера TMC2209 Софт Klipper До этого всё работало на A4988
Требуется подключить драйвера чтобы работало всё по UART и активировать Sensorless Homing по осям Х и У
Итак
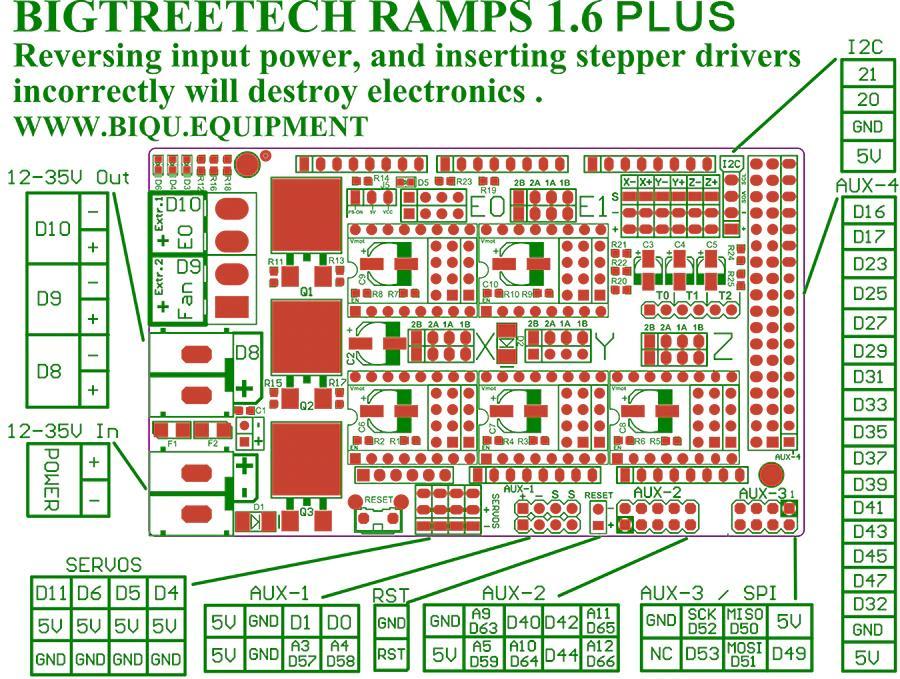
Первым делом надо проверить ногу PDN/UART на драйвере. Для работы с RAMPS 1.6+ в режиме без проводов надо чтобы PDN/UART был выведен на 4 ногу драйвера.

Если выведено на другую ногу, надо будет проводами соединять, для этого придётся эту ногу на драйвере перепаять снизу вверх
Потом надо выставить все перемычки под драйверами. Соединить надо только чёрные пины MS3 (это CS пины в случае подключения по SPI)

Соединив так закорачиваем UART пины драйверов на пины ARDUINO следующим образом X: D63 Y: D40 Z: D42 E0: D65 E1: D66

Ну и в клиппере останется просто добавить секцию про TMC драйвера в каждый раздел про оси. Вот пример по оси Х
[tmc2209 stepper_x]
uart_pin: ar63
microsteps: 16
interpolate: True
run_current: 0.8
hold_current: .8
sense_resistor: 0.110
stealthchop_threshold: 200
На всякий случай стоит проверить, какой резистор стоит на драйвере. Обычно 0.11Ом. Если он другой, то меняем значение в строчке sense_resistor
Для того, чтобы использовать Sensorless Homing надо подключить DIAG пины драйверов к пинам ARDUINO. Я подключил их к пинам концевиков X- и Y- на RAMPS, что соответствует для Х D3 и для Y D14. Если пин не выведен наверх, то его надо будет также перепаять ногой вверх.
Вот так должно получится. Только голубые соединения выполнены проводочками, остальное уже разведено на 1.6+:

В прошивке комментируем назначение концевика и переназначаем его на виртуальный пин, который обозначаем соответственно. Например для оси Х это будет так:
#endstop_pin: ^ar3
endstop_pin: tmc2209_stepper_x:virtual_endstop
diag_pin: ^ar3
driver_SGTHRS: 120
Значением driver_SGTHRS регулируем чувствительность определения того, что каретка упёрлась в конец оси. Если слишком рано тормозит, то уменьшаем, если наоборот бьётся в край и не останавливается, то увеличиваем.
Спасибо за внимание!
Еще больше интересных статей
Собери свой Re-D-Bot
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
В представленной вашему вниманию статье, изложена по...
Z-Bolt - H-bot & CoreXY 2в1. Чертежи для резки. Список деталей. Видеоинструкция по сборке.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Часть 1.
Часть 2.
Часть 3....
FuseBox Core XY для домохозяйки
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
Комментарии и вопросы
Пружинки помощнее ставьте, а е...
Допустим что тормозная система...
То-то и оно, что зажим держит....
Решил перепрошить медведя, что...
Сделал модель в блендере, заки...
Здравствуйте! Заметил тут, что...
Имею самосбор, доставшийся от...