

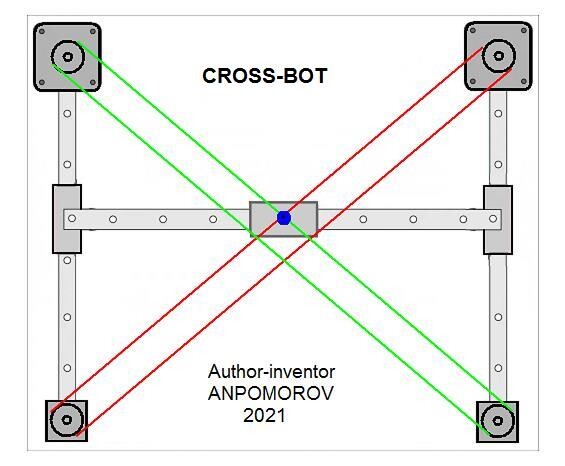
Cross-BOT. Приснилась новая кинематика для 3D принтера.

Вроде бы не так уж и много кинематик у 3D принтеров, но в каждой из них есть плюсы и минусы. То ремней много, то перекосы, то массы и т.д. И вот мне подумалось: во всех кинематиках каретку приводит в движение два шаговых двигателя косвенно - через систему ремней, роликов, а иногда и вращающихся валов. А почему бы не таскать каретку напрямую, отказавшись от лишних элементов и укоротив ремни до минимума. И приснился мне крест через весь принтер. На рисунке понятно, как это всё работает. Два кольцевых ремня с креплением каждого из них ровно в центре каретки (это важно). Достоинств вижу много, недостатки тоже есть.
А что видите вы? Приглашаю к обсуждению новой кинематики. Для помидоров уже приготовил корзину :-)

Еще больше интересных статей
Вот такое радио
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
По...
AD5X + сушилка установленная сверху
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
MMRU (Multi Material Russian Upgrade) (Часть 6: Анонс новой механики)
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
{kind=link}
Комментарии и вопросы
Для склейки половинок - делаем...
Полости заливать гипсом с подм...
Ну полная безграмотность...Ува...
Здравствуйте уважаемые.На 205...
Здравствуйте. Возникла проблем...
Доброе утро.Подогреваю стол на...
Здравствуйте. Такая проблема т...