

MKS Nano 1.3 + TMC2209 в режиме UART + klipper

Q: Какая цель данного подключения ?
A: для того чтобы управлять настройками драйверов из прошивки, позволяет получить более полный контроль над драйверами, выставлять ток не потенциометром на драйвере, а просто в прошивке вписать нужную цифру, переключать режим работы драйвера
Введение:
Данная статья не для продвинутых, а для начинающих кто растерялся в многообразии информации, но хочет использовать на MKS Nano 1.3 драйвера в режиме UART.
т.к. MKS NANO 1.3 не имеет возможности полноценного управления драйверами по UART, будем использовать 1 проводную схему.
т.к. в таком режиме каждому драйверу назначается 2я перемычками, всего у нас есть возможность управлять 4 драйверами.
Поэтому рекомендую использовать X,Y,E0 а Z, E1(Z1.1) оставить по старой схеме (т.к. у нас на Z два двигателя и ось Z не так важна в плане крутизны драйвера)
Или вариант X,Y,Z1,Z1.1 тогда на E (экструдер не хватит) можете выбирать что для вас важнее
Перемычками MS1/MS2 выбираем адрес а третью ОБЯЗАТЕЛЬНО УБИРАЕМ т.к. можем вызвать короткое замыкание в режиме работы по UART !

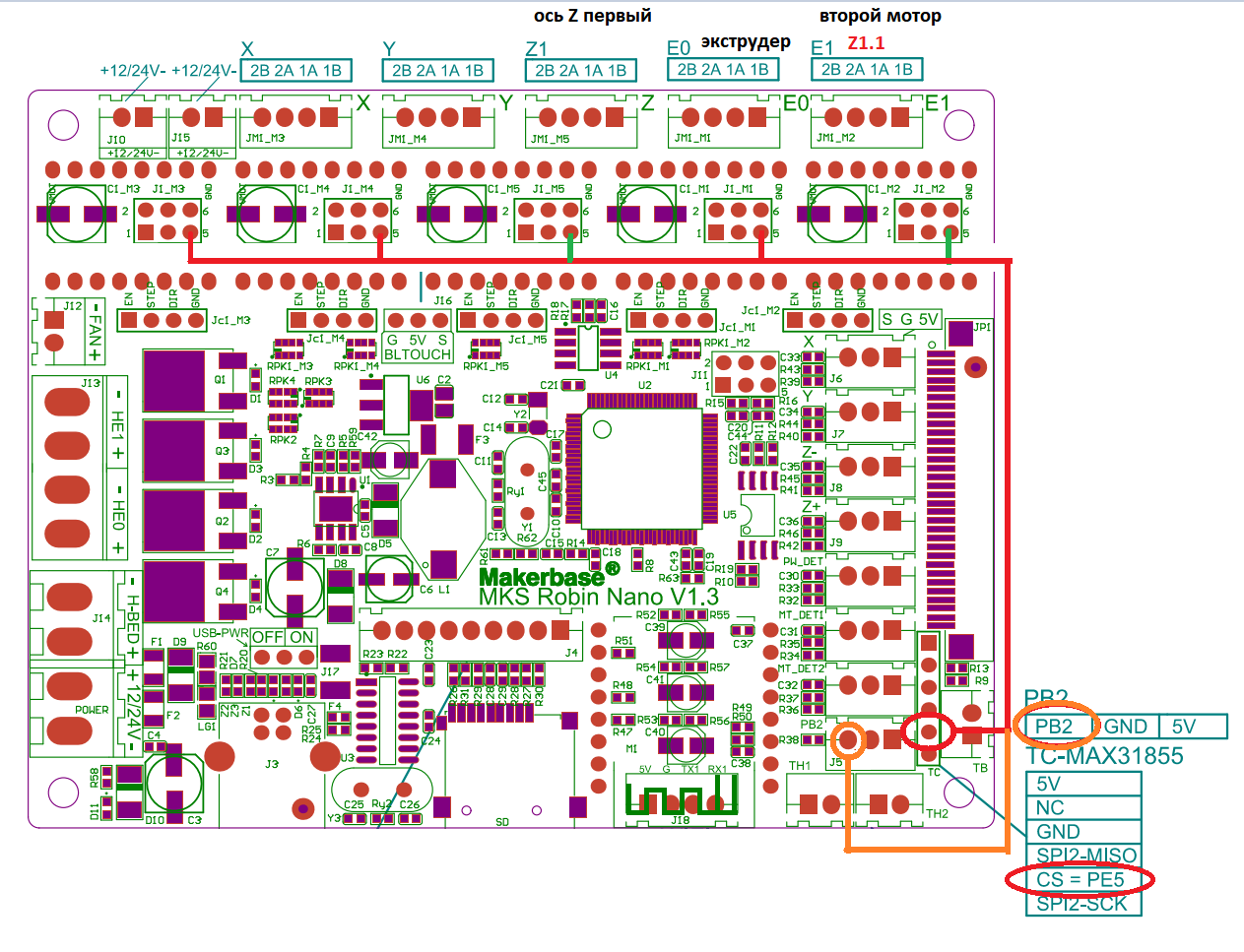
В качестве управляющего пина можно использовать на материнской плате PB2 (разъем J5) изначально он используется для Автоматического выключения, у меня он оказался свободным - поэтому он, также кандидат на управляющий пин PE5 c разъема TC как я понял по задумке это преобразователь для термопары у меня тоже свободен.
Опытные аксакалы рекомендуют использовать PE5 а PB2 оставить свободным для нужд авто отключения на Марлине. Для тех кто на Klipper используйте любой разъем как вам удобнее.
Для продвинутых юзеров можно использовать UART на все 5 драйверов, используя такой лайфхак:
Z1, Z1.1 можно оставить 2208/2225. А на X,Y,Z на 2209 ставить 1 2 и 3 адреса. при этом Z будут 2208, 2225(можно и 2209) будут на нулевом. (необходимо снять все три перемычки). Но как мне кажется смысла в этом нет. (у меня лично не получилось, клиппер ругался при хоуминге оси Z, в итоге оставил на UART только X,Y,E0)
Делаем набросок схемы:
Чтобы наш драйвер понимал что от него хотят ему нужно подать сигнал на 4 пин драйвера, управление берем как договорились ранее с PB2 или PE5. Я уж было начал паять провод на драйвер но тут же придумал способ лучше, мы убрали перемычку PGN (условно говоря третья). Поэтому мне в голову пришла идея сделать такой ход. на Пин перемычки и подключимся. в этом случае мы не паяемся к плате и не паяемся к драйверу. Как по мне идея супер. для этого берем и припаиваем силиконовый провод к перемычке и получаем необходимый разьем. (использовать стандартные DUPONT не возможно потомучто они очень высокие, ну или возможно разобрав оболочку.
Важное отступление !
обратите внимание что у разных производителей в моем случае TwoTrees и BTT расположение пина относительно "крутилки" разное!!! короче не перепутайте как правильно вставлять на "мать"
мой выбор от TwoTrees потому что у них больше радиатор. Из-за большого радиатора нет длинных пинов для подключения по UART, если брать версию от BTT то можно подключать используя стандартные Dupont провода (такие как в ардуино) . Хотя в рекламе от BTT фото с тепловизора что якобы их версия лучше остальных (при этом не уточняют каких) :)


Визуализируем всю картину:
зеленым обозначил подключение к шине управления для тех кто захочет управлять и осью Z (хотя мне кажется в нашем случае это лишнее) обратите внимание на схеме нужно подключить или красную или оранжевую линию, не нужно и туда и туда :)
для тех у кого на Z один двигатель просто не обращайте внимание на E1 (Z1.1)

На а теперь всеми любимая практическая часть:
вот так выглядит моя версия подключения по UART трех драйверов X,Y,E1

и вот так с установленными драйверами 2209 X,Y,E0, 2225 Z1, Z11

Делаем необходимые добавления в конфиге klipper
у меня TMC_UART_PIN = PE5
для этого дописываем дополнительные секции в printer.cfg с префиксом TMC2209. описывать значения полей смысла не вижу и так визуально понятно. Принтер мой в стоке, ток выставил по 0.8А на XY и 0.4A на экструдер хотя можно больше. Если будут пропуски добавлю.
фрагмент printer.cfg:
[stepper_x]
step_pin: X_STEP_PIN
dir_pin: X_DIR_PIN
enable_pin: !X_ENABLE_PIN
rotation_distance: 40
microsteps: 32
endstop_pin: !X_STOP_PIN
position_min: 0.0
position_endstop: 0.0
position_max: 350 # X-axis bed size
homing_speed: 50
homing_retract_dist: 0
[tmc2209 stepper_x]
uart_pin: TMC_UART_PIN
#tx_pin: TMC_TX_PIN
run_current: 0.800
hold_current: 0.400
stealthchop_threshold: 999999
uart_address: 1
interpolate: True
[stepper_y]
step_pin: Y_STEP_PIN
dir_pin: !Y_DIR_PIN
enable_pin: !Y_ENABLE_PIN
rotation_distance: 40
microsteps: 32
endstop_pin: !Y_STOP_PIN
position_min: 0.0
position_endstop: 0.0
position_max: 310 # Y-axis bed size
homing_speed: 50
homing_retract_dist: 0
[tmc2209 stepper_y]
uart_pin: TMC_UART_PIN
#tx_pin: TMC_TX_PIN
run_current: 0.800
hold_current: 0.400
stealthchop_threshold: 999999
uart_address: 2
interpolate: True
[stepper_z] # left stepper
step_pin: Z1_STEP_PIN
dir_pin: !Z1_DIR_PIN
enable_pin: !Z1_ENABLE_PIN
rotation_distance: 8
microsteps: 32
endstop_pin: !Z1_STOP_PIN
position_min: -0.2
position_endstop: 0.0
position_max: 350 # Z-axis print volume size
homing_speed: 20
second_homing_speed: 5
[stepper_z1] # right stepper
step_pin: Z_STEP_PIN
dir_pin: !Z_DIR_PIN
enable_pin: !Z_ENABLE_PIN
rotation_distance: 8
microsteps: 32
endstop_pin: !Z_STOP_PIN
[extruder]
step_pin: E0_STEP_PIN
dir_pin: !E0_DIR_PIN
enable_pin: !E0_ENABLE_PIN
#rotation_distance: 7.600
rotation_distance: 7.674
microsteps: 32
nozzle_diameter: 0.400
pressure_advance: 0.065
filament_diameter: 1.750
max_extrude_only_distance: 100
heater_pin: E_HEATER_PIN
#sensor_type: ATC Semitec 104GT-2
sensor_type: EPCOS 100K B57560G104F
sensor_pin: E_SENSOR_PIN
min_temp: 0
max_temp: 240
min_extrude_temp: 0
[tmc2209 extruder]
uart_pin: TMC_UART_PIN
#tx_pin: TMC_TX_PIN
run_current: 0.400
hold_current: 0.200
stealthchop_threshold: 999999 #0
uart_address: 3
interpolate: True
Результаты:
подключить по UART оказалось совсем не сложно на все про все у меня ушло менее 1 часа. Теперь чтобы добавить ток или внести изменения в режим работы не нужно вскрывать "подвал", а просто поправить данные в конфиге.
Надеюсь статья принесет пользу.
Успешных экспериментов, и удачной печати !
Еще больше интересных статей
Система автоматической смены столов Chitu Systems PlateCycler C1M для Bambu Lab A1 mini
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Замена керамического нагревателя в 3D принтере QIDI X Plus 4 (франкенштейн)
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Не происходил нагрев. Датчик...
Настраиваем прошивку Marlin и заливаем её в 3D принтер
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
Комментарии и вопросы
Ну реле не советовал бы ставит...
У аирбаса очерёь заказов из 90...
Дроны или канатные механизмы и...
Доброго времени сутук. Делаю с...
здравствуйте. Прошу помощи вот...
Всем привет.Я разрабатываю про...
Как максимально просто и легко...