

Проект нового дрыгостола

Есть у многих 3дэшников такая забава - допиливать акриловую прушу. Думалось мне, что не придётся таким заниматься, ведь начал я прямо с H-bot на китайских рельсах, но тут подвернулся древний аппарат Cstar P802. Начал, как полагается, с модели, но что-то начали возникать сомнения правильно ли я всё делаю. Поэтому, решил излить их здесь, на потеху вам, товарищи, и чтобы услышать конструктивную критику.

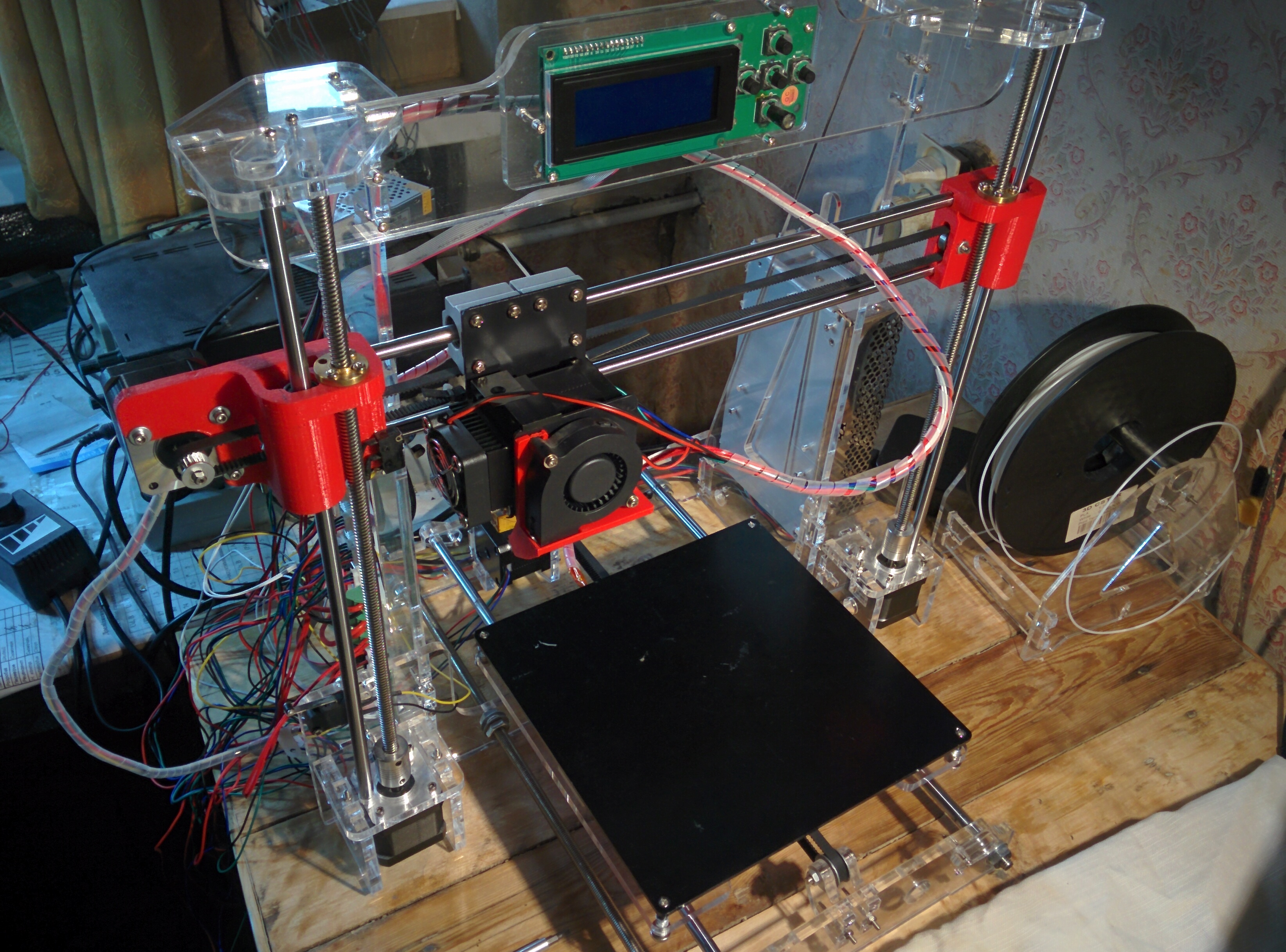
Давным давно друг купил его для какой-то своей цели, но потом не сложилось и он долго пылился, ожидая своего часа. Так он выглядел изначально:

Были предприняты вялые попытки его довести до ума, но до уровня моего самодельного он никак не дотягивал. Опуская подробности, решил я его привести в соответствие современным стандартам по полной программе, и тут понеслась...
Были поставлены следующие цели:
- 2 direct-экструдера на независимых каретках (компоновка IDEX);
- большая зона печати для нормальной работы в параллельном и зеркальном режиме;
- простота и дешевизна при достаточной жёсткости, при этом использовать побольше деталей, что есть в наличии.
Основные характеристики/особенности:
- Рабочая область 400х200х260 мм;
- экструдеры с ременным редуктором с передаточным числом 3;
- все направляющие диаметром 12мм;
- возможность в ограниченном диапазоне регулировать высоту хотендов относительно портала;
- 2 концевика оси Z;
- ременной привод по примеру принтеров Faberant.
Моделил в Solidworks. На данном этапе почти нарисованы рама, оси и экструдеры. Предстоит смоделировать крепления концевиков Y и Х, крепление мотора Y, держатели проводов, катушек, отсек электроники и, возможно, что-то, что я забыл здесь упомянуть.
Так как портал в такой компоновке можно сделать симметричным, я решил развить эту концепцию и сделал его части и экструдеры одинаковыми для обоих сторон. Можно сказать, добился осевой симметрии. В силу большой длины осей X было решено использовать в них 10мм ремни и 12мм направляющие. Частично это обусловило выбор кинематики - легче двигать стол, чем такой здоровенный портал. В готовом виде это будет выглядеть примерно так:
 На крепежах в модели я экономлю - нотбук не тянет)
На крепежах в модели я экономлю - нотбук не тянет)
Ремни осей X постарался провести как можно ближе к центру тяжести экструдеров чтобы минимизировать перекос кареток. В будущем хочу поэкспериментировать с втулками скольжения и это должно снизить их износ.

Пару слов об экструдерах:
Детали будут располагаться примерно как на картинке:
Хотенд с вентиляторами установлен под кареткой с подающим механизмом и держится на двух алюминиевых 8мм трубках. Его высота регулируется винтом, проведенным через выделенное отверстие:

После настройки эта сборка поджимается к трубкам через выделенные блоки (не уверен как правильно обозвать эти детали): Обдув далеко не финальной версии, буду ещё симуляцию проводить когда определюсь с механикой. Есть ещё вариант компрессором дуть, подводя воздух через одну из трубок, но это тема для отдельного исследования.
Обдув далеко не финальной версии, буду ещё симуляцию проводить когда определюсь с механикой. Есть ещё вариант компрессором дуть, подводя воздух через одну из трубок, но это тема для отдельного исследования.
Так как стол двойной, то и ремней на него пусть будет 2, за одно и его перекос будет не страшен. По началу ведущие шкивы обоих ремней будут соединены валом, который через замкнутый ремень будет вращаться одним обычным двигателем, но если с такой системой возникнут проблемы, поставлю двухвальный и будет он вращать шкивы напрямую. Сами же ремни оси Y будут 6мм, но протянуты опять по примеру Faberant.


Ездит на тех же LM12UU, что и остальные оси, есть мысли поставить втулки скольжения. Каркас из алюминиевого профиля 15х15х1.5. В наличии есть 2 вала по 400 мм и 4 держателя SK12 для них - остались после апгрейда предыдущего принтера.
Про ось Z особо нечего сказать, разве что концевиков планируется 2, что впишется в общую симметричность принтера и снимет головняк с рассинхронизацией моторов.
 Рама планируется в основном из всего что есть и станочного профиля 20х40. Тут и уже упомянутый 15х15х1.5, уголок 40х80х4, шпилька М8, а также пара перфорированных стальных пластин из хозяйственного магазина. На данный момент веду переговоры с жабой по поводу замены станочного профиля на аналогичную по размерам прямоугольную трубу. Старался уместить все компоненты в пределах рамы, чтобы сделать потом термокамеру, если приспичит. Когда возьмусь за отсек электроники, обязательно сделаю нормальные ножки.
Рама планируется в основном из всего что есть и станочного профиля 20х40. Тут и уже упомянутый 15х15х1.5, уголок 40х80х4, шпилька М8, а также пара перфорированных стальных пластин из хозяйственного магазина. На данный момент веду переговоры с жабой по поводу замены станочного профиля на аналогичную по размерам прямоугольную трубу. Старался уместить все компоненты в пределах рамы, чтобы сделать потом термокамеру, если приспичит. Когда возьмусь за отсек электроники, обязательно сделаю нормальные ножки.
Электроника будет жить в "подвале" под всем вышеописанным хозяйством. Работать же оно должно, по идее, на Klipper с двумя платами - melzi с этого же принтера и RAMPS 1.5, который всё ждёт своей участи. Тут я совсем не уверен, что всё пойдёт по плану, так как не имею опыта с этой прошивкой, да и подобную компоновку мало кто использует, но в любом случае, это будет весело. Питаться оно будет от 12В по всё той же причине - такой БП есть в наличии.
Такие дела, если кому интересно, продолжу по возможности писать о прогрессе этого проекта.
Еще больше интересных статей
Z-Bolt - H-bot & CoreXY 2в1. Чертежи для резки. Список деталей. Видеоинструкция по сборке.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Часть 1.
Часть 2.
Часть 3....
Мама, почему я репрап?
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
FuseBox Core XY для домохозяйки
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
{kind=link}
{kind=link}
Комментарии и вопросы
так яж говорю - ракурс такой в...
Там стол лакированный, зеркаль...
и на последнеей фотке тоже не....
Запустил своего старичка на пе...
Вечера доброго уважаемые колег...
Всем привет. Помучился с китай...
Знакомый заколебался мен...