

Введение в 3D сканирование и краткий обзор сканера Revopoint Range

Вместо вступления
Данная статья представляет собой комплекс из общего описания сканирования вообще и уже рассмотрение самого сканера Revopoint Range, включая его сравнение со сканером Mini. Если вам не нужны «общие данные», то сразу же листайте к нужной части статьи.
1. Введение
Если бы году так в 2004 кто-то спросил «а сколько стоит 3Д принтер?», то подавляющее большинство бы спросило «а что это?». Другие, которые хотя бы поняли вопрос, наверняка ответили «очень дорого» и были бы правы. До популяризации технологии она может и считаться, и фактически быть уникальной, а потому использующие ее конечные изделия будут крайне дорогими. А ко всему прочему еще и неоптимально сконструированными, неуклюжими и необязательно хорошо работающими. Чего стоят те же фотополимерные 3Д принтеры 10-12-летней давности, когда «народным» среди них считался B9 Creator, имеющий в своей начинке дорогой DLP проектор, ванночку, залитую непростым разделительным составом, и ввиду конструкции имеющий проблемы как геометрии, так и пропечатываемости изделий на краях луча проектора. Про «народную» цену лучше и не вспоминать.
Та же судьба была и есть у 3Д сканеров, которые только недавно начинали «выбираться в люди». Понятно, что более-менее бюджетные модели уже появились, но сканеры пока далеки от «есть у каждого гика». А те, что есть, обычно не отличаются высокой точностью. Да, техническая начинка типового сканера не особо и сложная, но ценник сейчас часто зависит не от самой начинки, а от наценки, основанной больше на окупаемости разработки и желании хлеба с толстым куском масла и икры для производителей.
На фоне этого появляются китайские компании со своими разработками (ну или, как в случае с известной историей со сканерами Creality, не с полностью своими), которые обещают дать энтузиастам возможность сканирования за разумный ценник.
Еще нужно отметить, что есть сканеры, жестко привязанные к своим поворотным столам, т.к. при сканировании изделия, при котором гарантированно известно положение предмета и угол его поворота относительно сканера, можно гарантировано же совмещать кадры сканирования, а есть те, что позволяют сканировать во Free Hand режиме, т.е. водя сканером вдоль сканируемой поверхности, т.к., например, автомобиль вы на небольшой поворотный столик не поставите. А потому сканеры «второго рода» наиболее интересны, т.к. только они относятся к категории сканеров универсальных.
В этой статье речь пойдет о сканерах компании Revopoint, которые как раз относятся к условному второму типу сканеров, позволяющими сканировать произвольные поверхности.
2. Технология сканирования
Сканеры Revopoint работают на технологии структурированного света. В середине сканера находится микропроектор, который проецирует на сканируемый объект полосы света, а находящиеся с двух сторон камеры считывают картинку, когда эти полосы из-за падения их на объект для камер «выглядят» уже искривленными линиями, формирующими поверхность, пересечение же этих поверхностей с двух камер дают нам конечную форму поверхности уже самого объекта. Звучит малопонятно, но суть технологии не такая и сложная, главное, чтобы рассчитывающая всё это система правильно понимала, какая именно линия на объекте соответствует какой на проекторе. Прошу прощения, это изображение я делал для западного форума, а найти исходник сейчас уже не смог, потому надписи на инглише. На ней изображено то, как выглядит объект с двух камер, левой и правой, в линиях проекционного луча:
 На изображении ниже можно увидеть, где находится зона сканирования, собственно, сканера. А справа вы можете увидеть, почему сканеры крайне не любят отверстия, а тем более малого диаметра, в объектах. Иногда в эти отверстия даже вкручивают винты или шпильки перед сканированием, чтобы сканер точно показал, где находится отверстие, пусть и путём «наоборот». В особо торжественных случаях туда просто втыкают свернутые трубочкой листы бумаги.
На изображении ниже можно увидеть, где находится зона сканирования, собственно, сканера. А справа вы можете увидеть, почему сканеры крайне не любят отверстия, а тем более малого диаметра, в объектах. Иногда в эти отверстия даже вкручивают винты или шпильки перед сканированием, чтобы сканер точно показал, где находится отверстие, пусть и путём «наоборот». В особо торжественных случаях туда просто втыкают свернутые трубочкой листы бумаги.
 Но вернемся к описанию… Результирующие «пересечения» поверхностей на объекте даёт нам облако точек. Так, делая последовательно фотографии спроецированных на объект линий, мы получаем облака точек на каждый кадр. В случае с зафиксированным положением поворотной платформы сканера на каждый кадр, взаимное расположение точек на этих кадрах определяется достаточно просто. В случае свободного сканирования, когда вы водите сканером вдоль поверхности, это взаимное определение положения облаков является… жуткой проблемой и головной болью, во всяком случае для бюджетных сканеров.
Но вернемся к описанию… Результирующие «пересечения» поверхностей на объекте даёт нам облако точек. Так, делая последовательно фотографии спроецированных на объект линий, мы получаем облака точек на каждый кадр. В случае с зафиксированным положением поворотной платформы сканера на каждый кадр, взаимное расположение точек на этих кадрах определяется достаточно просто. В случае свободного сканирования, когда вы водите сканером вдоль поверхности, это взаимное определение положения облаков является… жуткой проблемой и головной болью, во всяком случае для бюджетных сканеров.
Полученное посредством сканирования облако точек обрабатывается, обычно на компьютере, хотя сейчас это возможно и на телефоне, при этом отсекаются наложившиеся друг на дружку поверхности, убираются попавшие в кадр нежелательные фрагменты, производится спайка находящихся рядом точек для уменьшения их общего количества. После этого создается поверхность, которая уже экспортируется для дальнейшей работы с ней.
Что интересно, преобразование облаков точек в конечную 3Д модель сейчас возможно даже бесплатным программным обеспечением, например Cloud Compare. Причем результат как минимум не хуже, чем результат работы родного софта от Revopoint.
Про сканеры также добавлю, что на некоторых сканерах ставится и цветная камера, делающая фотографии для задания цветов получаемому облаку точек, из которых потом можно получить текстуру поверхности.
Сканеры на основе структурированного света больше всего «любят» матовые объекты средней яркости. Они не могут сканировать высокоглянцевые, прозрачные или слишком тёмные поверхности. Сканеры на основе лидара в этом плане более универсальны, но и менее точны. В идеале, поверхность матируется спреем для сканирования (есть «самоисчезающие», а есть более бюджетные, которые вы потом очищаете сами), оклеивается маркерами, после чего уже сканируется. При этом вы теряете цветовую текстуру объекта, но лучше сканируете саму поверхность.
3. Модели сканеров Revopoint
Не говоря сейчас о том, что Revopoint производит и более специализированные сканеры, рассмотрим модельный ряд потребительских сканеров, чтобы было понятно, в какой «смысловой» сегмент относится герой статьи. Я рассмотрю их здесь не в «смысловом», а в хронологическом порядке. Порядок их появления следующий:
- POP
- POP 2
- Mini
- Range
POP

POP, он же Pop 1 – первый потребительский сканер, деньги на который Revopoint собирала на Kickstarter в конце 2020 года. Он позиционировался как цветной Free Hand сканер невысокой точности (заявлено 0.3 мм), но доступной цены, с возможностями использования с компьютером или телефоном, сканирования в режиме маркеров и с использованием поворотного стола. Он использовал инфракрасный проектор, две камеры ИК диапазона и цветную камеру для захвата текстуры. Замечу, что наличие цветной камеры на сканерах Revopoint отличает их от основного сегодняшнего конкурента, Creality CR-Scan Lizard. Хотя, у Creality недавно появился сканер Ferret. Продается достаточно дешево, что из себя представляет, пока не знаю.
Когда я встретил в интернете первые результаты сканирования, то для себя сказал, что технология интересная, ценник уже в принципе подъемный, но пока доверия не внушает – даже на сравнительно крупных отсканированных фигурах было заметно сильное смазывание деталей из-за низкой точности сканера.
POP2
 Pop 2 имел уже улучшенные характеристики ("официальная" точность улучшена до 0.1 мм), по факту качество сканов было заметно выше, пусть и всё еще не идеал. В Кикстартере оного я даже хотел поучаствовать, но узнал об этом, только когда тот как раз месяц как закончился. Про данный сканер скажу, что он фактически является заменой сканера Pop, эффективно превосходя его во всём, т.е. это именно следующее поколение, а потому про Pop 1 можно просто забыть.
Pop 2 имел уже улучшенные характеристики ("официальная" точность улучшена до 0.1 мм), по факту качество сканов было заметно выше, пусть и всё еще не идеал. В Кикстартере оного я даже хотел поучаствовать, но узнал об этом, только когда тот как раз месяц как закончился. Про данный сканер скажу, что он фактически является заменой сканера Pop, эффективно превосходя его во всём, т.е. это именно следующее поколение, а потому про Pop 1 можно просто забыть.
Когда Revopoint снова анонсировали запуск уже следующего поколения, обещающего существенно большую точностью ценой формулировки (приблизительно) «не является заменой Pop 2, предназначен для объектов меньшего размера», я не удержался и вложился в данный кикстартер. Как минимум было понятно, что что-то они сделают точно, т.к. два «прецедента» уже были выпущены.
Но уже тогда я серьезно догадывался, что эта точность не выйдет «бесплатной» для удобства работы, а удобство – это не совсем «ну подумаешь, вместо пяти минут будешь сканировать целых семь».
Mini

Собственно, третья модель, а, по сути, вторая в линейке, если убрать Pop 1. Отличалась заявленной точностью уже в 0.02 мм и использованием для этого проектора синего спектра вместо ИК, что усложнило работу при сканировании, например, лица человека, т.к. эта яркая мерцающая лампочка нормально позволяет сканировать только при закрытых глазах. Это не лазерный диод, потому глазам вряд ли навредит, но тот факт, что это гадкая мерцающая дрянь, это не отменяет… Пардон, отвлекся.
Фокусировка миника сделана на очень малом расстоянии, а мощность излучателя не позволяет получать данные на большом расстоянии. В результате, сканирование производится с расстояния 10-15 см, что дает нам эту самую высокую точность.
По некоторым данным, этот сканер не любит яркий свет, для сканирования ему "достаточно" темноты, т.к. он сам является источником света, необходимого для сканирования.
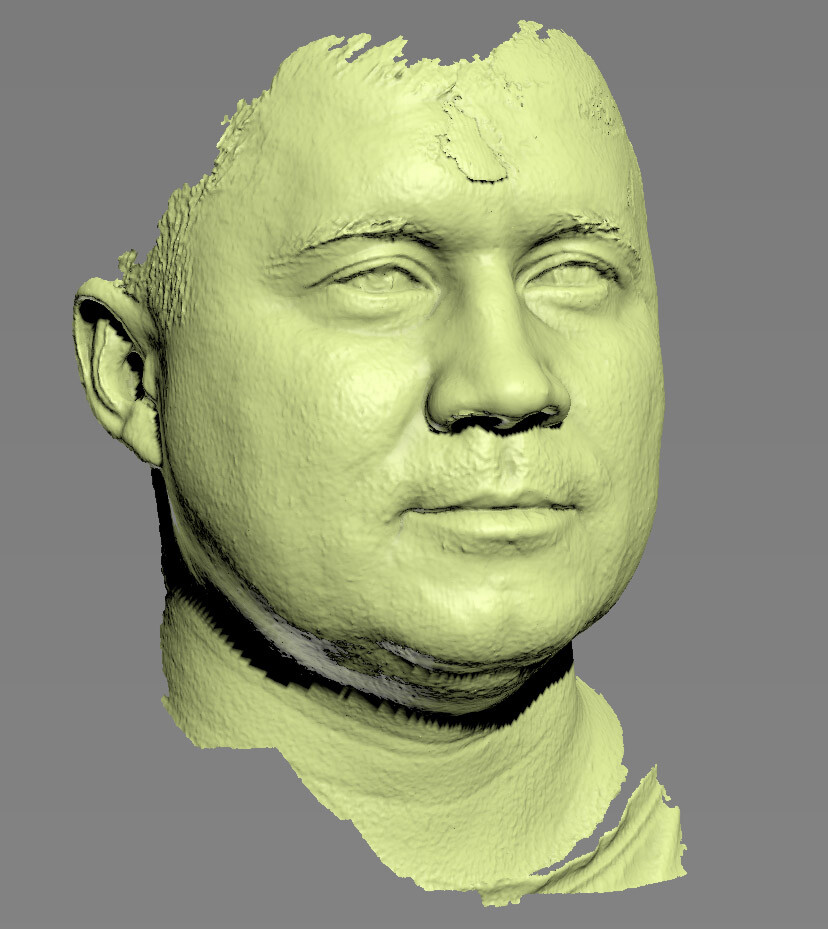
Приведу пример скана лица этим сканером, чтобы можно было оценить его возможности:

Если не считать проявившейся паразитной поверхности на лбу, результат можно назвать вполне неплохим. Сканирование производилось при обычном домашнем освещении за один проход.
Немного отвлекусь и опишу процесс сканирования луча квадрокоптера Hubsan Zino 2 для общего понимания, что иногда требуется, чтобы отсканировать объект, и что это не "да провел пару раз сканером, там делов-то". Нет, это вполне себе работа, а в случае с Мини еще и не самая простая. Так выглядел "загриммированный" под сканирование луч:
 Первая попытка сканирования на поворотном столе:
Первая попытка сканирования на поворотном столе:
 Но дрифт скана во время поворота стола приводил к тому, что даже имеющий условно нулевую толщину маркер заметно "полнел":
Но дрифт скана во время поворота стола приводил к тому, что даже имеющий условно нулевую толщину маркер заметно "полнел":
 В результате, сканирование проводилось методом нескольких сканов, сделанных отдельными "проводками" с последующей склейкой. Так выглядела попытка склейки в полуавтоматическом режиме:
В результате, сканирование проводилось методом нескольких сканов, сделанных отдельными "проводками" с последующей склейкой. Так выглядела попытка склейки в полуавтоматическом режиме:
 В результате было видно, что поверхности все равно на заметные доли миллиметра "нависают" или "загибаются". Потому склейку производил уже в полностью ручном режиме, что было уже жутким убийством времени. Так выглядел результат уже реального сопряжения сканов:
В результате было видно, что поверхности все равно на заметные доли миллиметра "нависают" или "загибаются". Потому склейку производил уже в полностью ручном режиме, что было уже жутким убийством времени. Так выглядел результат уже реального сопряжения сканов:
 На изображении указано, что маркерные точки воспринимаются сканером не совсем корректно, потому на разных сканах они создают эти фиктивные "бугорки" немного в разных местах.
На изображении указано, что маркерные точки воспринимаются сканером не совсем корректно, потому на разных сканах они создают эти фиктивные "бугорки" немного в разных местах.
Возвращаясь к оптимальному расстоянию для сканирования, в этом месте появляется важное «но». Угол обзора камер очень мал, и привязка соседних кадров между собой делается на основании очень малой площади. Потому трекинг слетает. Потом снова слетает. Потом не слетает, но кого мы обманываем… слетает. Просто вместо «tracking failed» мы получаем готовый результат, где, например, при использовании поворотного стола, после полного оборота оного выясняется, что за это время модель «сместилась» и мы имеем уже две поверхности вместо одной. Но пока оставим эту тему, перейдем к самой новой модели сканера линейки модели Revopoint.
Range

Этот сканер предназначен для сканирования объектов большего размера, имеет в большей мере разнесенные камеры. Вместо 10-15 см «Миника» он может использоваться на расстоянии чуть более полуметра до объекта. Данный сканер заявлен производителем как подходящий для сканирования сравнительно крупных объектов. Заявленная точность 0.1 мм, максимальное расстояние сканирования 600 мм, частота кадров до 18 к/с. Как мы понимаем, это "пиковые" характеристики, т.е. на расстоянии 600 мм он не даст ни 0.1 мм, ни, хотя бы стремясь к ним, не позволит получить 18 к/с для улучшенного трекинга.
Не могу сказать с уверенностью, но есть подозрение, что этот сканер может заменить собой Pop 2, т.к. те примеры сравнений, что я видел, не показывали явного преимущества последнего в точности сканов, а Range при этом является существенно более универсальным.
4. Программное обеспечение
Revopoint использует свой софт для работы как с самим сканером, так и для работы с облаком точек. Еще недавно это были отдельные программы: RevoScan 4 для сканирования и RevoStudio для последующего редактирования и сшивки, но сейчас всё перешло в единую RevoScan 5, которая уже является полноценным рабочим решением. Кстати, замечу, что пятая версия уже ощутимо «взрослее» четверки. В частности, в сравнении с четвертой версией, там появилась возможность выставления автоматического усиления для камер глубины. Но работает это только на компьютере, на телефоне требуется выставление экспозиции вручную.
Так выглядел интерфейс RevoScan 4:
 А так уже RevoScan 5:
А так уже RevoScan 5:
 Работа с RevoScan лично у меня нареканий не вызывает. Всё достаточно просто, удобно и вроде бы даже безглючно с парой оговорок ниже. Есть инструменты сшивки с указанием радиуса, сглаживание (читай фильтрация шумов), удаление двойных поверхностей, мешинг, текстурирование. Программа, кроме непосредственно результатов сканирования ревопоинтовских сканеров, может загружать и произвольные облака точек или же полигональные модели. Судя по всему, из новой версии убрали преобразование уже конечных моделей обратно в облако точек.
Работа с RevoScan лично у меня нареканий не вызывает. Всё достаточно просто, удобно и вроде бы даже безглючно с парой оговорок ниже. Есть инструменты сшивки с указанием радиуса, сглаживание (читай фильтрация шумов), удаление двойных поверхностей, мешинг, текстурирование. Программа, кроме непосредственно результатов сканирования ревопоинтовских сканеров, может загружать и произвольные облака точек или же полигональные модели. Судя по всему, из новой версии убрали преобразование уже конечных моделей обратно в облако точек.
В процессе сканирования Revoscan позволяет остановить сканирование, сделать отмену нескольких секунд действий, после чего продолжить. К сожалению, функция не только нужная и удобная, но и часто используемая.
Качество работы механизма выравнивания относительно друг друга нескольких сканов для получения единой модели мной пока достаточно не изучен, чтобы сказать, достаточно ли адекватно он работает на пятой версии или же для точного совмещения придется делать это в полностью ручном режиме там, где действительно требуется точность.
Revoscan 5 существует и для персоналок, и обоих «кланов» телефонов.
Касаемо «пары оговорок». При нескольких загрузках-выгрузках моделей однажды было очень странное и, строго говоря, неприятное: при загрузке модели Revoscan завис, после снятия задачи и перезагрузки выяснилось, что вся папка сканирования удалена с диска. При повторной загрузке Revoscan и загрузки другой модели случилось то же самое. У меня была копия сканирования, оставшаяся в самом телефоне, но для кого-то может стать конкретным таким сюрпризом.
5. Revopoint Range
Наконец перейдем к виновнику торжества, приехавшему с Кикстартера несколько дней назад. Сканер пришел в неожиданно широкой транспортировочной коробке. Комплектация обычная, без большого поворотного стола. Прошу прощения за несколько "корявый" фон для фотографии

В транспортировочной коробке видим уже саму коробку со сканером и лежащие на ней дополнительные маркеры, заявленные Revopoint как «stretch goal», т.е. «если мы наберем данное количество денег, мы добавим вам еще вот это». Маркеры на фото лежат вверх ногами, потому вид у них непонятный.
 Содержимое коробки:
Содержимое коробки:
 В ней находятся, собственно, сам сканер, небольшой раздвижной штатив (сходный с тем, что был у Mini, но без выдвижных ножек), батарейная ручка на, судя по форме, 16850-м аккумуляторе. С Mini такая в комплекте не шла; вещь удобная, т.к. заменяет собой дополнительный пауэрбанк при работе с телефоном. Далее, крепление для телефона, «основной» набор маркеров, переходник с USB на USB Type-C, документация, черный чехол, полоска двухстороннего скотча неизвестно для чего и два типа кабелей – для подключения к телефону и пауэр банку и для подключения к компьютеру без использования пауэр банка. Одна оговорка: сканирование с айфонов возможно только по WiFi. Что радует, кабель используется стандартный, который при необходимости можно будет заменить гораздо проще, чем специальный проприетарный (где-то навзрыд плачут владельцы некоторых шлемов виртуальной реальности). Кабель используется такой же, как и на Mini. Это USB Micro Type B, который иногда используется для подключения внешних дисков.
В ней находятся, собственно, сам сканер, небольшой раздвижной штатив (сходный с тем, что был у Mini, но без выдвижных ножек), батарейная ручка на, судя по форме, 16850-м аккумуляторе. С Mini такая в комплекте не шла; вещь удобная, т.к. заменяет собой дополнительный пауэрбанк при работе с телефоном. Далее, крепление для телефона, «основной» набор маркеров, переходник с USB на USB Type-C, документация, черный чехол, полоска двухстороннего скотча неизвестно для чего и два типа кабелей – для подключения к телефону и пауэр банку и для подключения к компьютеру без использования пауэр банка. Одна оговорка: сканирование с айфонов возможно только по WiFi. Что радует, кабель используется стандартный, который при необходимости можно будет заменить гораздо проще, чем специальный проприетарный (где-то навзрыд плачут владельцы некоторых шлемов виртуальной реальности). Кабель используется такой же, как и на Mini. Это USB Micro Type B, который иногда используется для подключения внешних дисков.
 Так выглядит Range, установленный на батарейную ручку с раздвижным креплением для телефона. Быстросъемное крепление на самом сканере также съемное, установленное на стандартное крепление для штатива.
Так выглядит Range, установленный на батарейную ручку с раздвижным креплением для телефона. Быстросъемное крепление на самом сканере также съемное, установленное на стандартное крепление для штатива.
 На фото ниже можно приблизительно сравнить комплектации Range и Mini. Прошу прощения, некорректно не убрал гарантийник, закрывший частично содержимое коробки миника. Можно заметить, что в комплекте с Range бюст не положили. Хотя, думаю, он должен был бы быть минимум вдвое больше, чем для Mini.
На фото ниже можно приблизительно сравнить комплектации Range и Mini. Прошу прощения, некорректно не убрал гарантийник, закрывший частично содержимое коробки миника. Можно заметить, что в комплекте с Range бюст не положили. Хотя, думаю, он должен был бы быть минимум вдвое больше, чем для Mini.

Небольшое замечание про батарейную ручку: ее емкости более чем достаточно для продолжительной работы сканера. Пока я ее заряжал только один раз.
Установка софта как на компьютер, так и на телефон, беспроблемная. Всё запускается сразу и без бубнов. Сканер тоже видится при подключении, разве что у меня телефон каждый раз спрашивает разрешение для доступа к нему программой.
Полный цикл сканирования возможно проводить непосредственно на телефоне, но одно из основных нововведений RevoScan 5 – возможность импорта проектов с телефона на компьютер, т.к. это позволяет получить бОльшую детализацию скана. Плюс общее удобство работы, понятно.
Перед тем как перейти непосредственно к сканированию, вначале опишу одну ложку дегтя. Точнее, там несколько десятков ложек сразу в одном слове: «трекинг». Т.к. сканер, по сути, делает фотографии, где у каждой точки есть координата по глубине, то взаимное сопряжение этих фотографий, которое нам и создает непосредственно скан, это и есть трекинг. Трекинг основан на сразу нескольких алгоритмах, когда тот или иной сканер может использовать сразу несколько из них или только один. И, насколько я понял, все сканеры Revopoint используют только один: сравнение облаков точек в соседних кадрах и с общим уже полученным облаком. Т.е. облака точек сравниваются, находится положение для камеры, при котором они совпадают наибольшим образом, после чего это положение уже фиксируется в общем облаке точек и сканер переходит на новую «фотографию». О том, что сканер даже не использует датчик ориентации, косвенно говорит то, что первый кадр сканирования в модели всегда направлен "вперед", т.е. без привязки к горизонту.
Проблема с этим одна и простая… До этого я работал с, пожалуй, самым плохим в плане трекинга сканером Revopoint (и, скорее всего, не только среди Revopoint) – моделью Mini. У этого сканера самое малое «окно» сканирования, в результате трекинг у него находится вообще на грани неработоспособности. Даже при сканировании штатного прилагаемого бюста на поворотном столе (идеальный вариант) трекинг может «поехать», создавая к концу оборота стола двойную поверхность. При произвольном сканировании при фактическом где-то 5 к/с трекинг отваливается в любой момент независимо от использования маркеров. И, судя по обзорам в Ютубе от людей, которые пользовались разными сканерами, у этого (Мини) – самый плохой трекинг из всех. Т.е. да, вы можете получить действительно качественные детальные сканы уровня очень небюджетных сканеров, но с оговоркой «если сможете». Например, если вы захотите в Free Hand режиме отсканировать лежащий на столе калибровочный кубик 40х40х40 с вдавленной XYZ разметкой на гранях, я вам прямо говорю: за один проход без совмещения сканов у вас это просто не получится. Вообще никак и никогда. Даже если вы рассыпете вокруг него мелкий пластиковый мусор, который сканер сможет использовать для трекинга, попляшете с бубном, споете гимн Франции и принесете в жертву программиста Ревопоинта, который этот трекинг писал.
К чему я это говорю в ключе сканера Range. Он имеет повышенную частоту кадров (но в основном я видел те же от 5 до 15 к/с, ни разу не встречая заявленных 18) и, что важно, гораздо более широкое поле обзора. При этом, даже имея тот же трекинг, что и у Mini, получать сканы с него гораздо проще. Да, нужно проводить сканером очень аккуратно без резких поворотов (помня о качестве трекинга Мини), нужно постоянно держать в голове то, не попадётся ли сканеру поверхность, где зацепиться может быть сложно, думать дважды перед тем, как поворачивать сканер, особенно в вертикальной плоскости. Но, судя по моим тестам, это действительно вполне рабочий сканер. Да, он не обладает точностью «миника» даже близко, но при этом позволяет отсканировать вещи размером с диван в некоторых случаях даже за один проход. К слову, при использовании им с телефоном есть ограничение в 2000 кадров для одного скана.
Далее, режимы сканирования. Фактически, у сканера 3 режима: General, Body и Large. Судя по данным оптимальных расстояний (шкала справа), они отличаются расстоянием, которое сканер считает наилучшим для сканирования. Меняется ли при этом фокусировка камер, «яркость» проектора или же нет, я не знаю. Скажу только, что уже в Body режиме он позволил мне, внезапно после Mini, отсканировать немалый фрагмент ванной комнаты за один проход без потерь трекинга вообще. Режим Large я по факту не проверял. Скажу про него только, что оптимальная дистанция сканирования по данным софта такая же, как и в случае Body.
Также, при выборе режима, есть еще выбор низкой или высокой точности сканирования. Для высокой точности режим Large (для крупных объектов) недоступен.
Т.к., к сожалению, на момент написания статьи ваш покорный банально болел и отсканировать что-то чуть большее, чем предметы домашнего интерьера возможности не имел, то примеры, собственно, будут уже означенные.
Итак… Отсканированный в один проход с телефоном диванчик. Да, не целиком. И да, можно было не полениться, сделать несколько проходов, после чего их склеить. Но уж как есть.


 Это скан части ванной комнаты в режиме Body Mode. Обратите внимание, что кран в самой ванной из-за хромового покрытия стал невидимым для сканера, превращаясь в «тень». Для сканирования подобных объектов уже требуется применение специальных матирующих спреев. И, несмотря на то, что для сканирования здесь не применялись маркеры, т.е. это полностью «feature tracking» (отслеживание особенностей поверхности) – и ни единого разрыва!
Это скан части ванной комнаты в режиме Body Mode. Обратите внимание, что кран в самой ванной из-за хромового покрытия стал невидимым для сканера, превращаясь в «тень». Для сканирования подобных объектов уже требуется применение специальных матирующих спреев. И, несмотря на то, что для сканирования здесь не применялись маркеры, т.е. это полностью «feature tracking» (отслеживание особенностей поверхности) – и ни единого разрыва!

Здесь можно увидеть разницу в сканировании в режиме General и в режиме Body. Да, бутылка посередине и в реальности смята. Обратите внимание на расшивку кафеля: Так выглядит процесс сканирования на телефоне:
Так выглядит процесс сканирования на телефоне:

Так, оно же, но "снаружи":
 Скрин из программы в процессе работы над "диванчиком":
Скрин из программы в процессе работы над "диванчиком":  К слову, данные процесса сканирования представляют собой inf файл (для каждого кадра), содержащий метаданные, dph файл размером 512000 байт для высокого качества сканирования, в котором содержатся данные глубины и, в случае включенного цветного сканирования, img файлы, представляющие собой обычные переименованные джепеги разрешением 1280х800 с перепутанными каналами синего и красного. Вот один в качестве примера фотографии цветной камерой (каналы исправил):
К слову, данные процесса сканирования представляют собой inf файл (для каждого кадра), содержащий метаданные, dph файл размером 512000 байт для высокого качества сканирования, в котором содержатся данные глубины и, в случае включенного цветного сканирования, img файлы, представляющие собой обычные переименованные джепеги разрешением 1280х800 с перепутанными каналами синего и красного. Вот один в качестве примера фотографии цветной камерой (каналы исправил):
 Далее я приведу сравнение сканирования Range и Mini на основе сделанных в офисе сканов. Ниже приведена пара сканирования старого системного блока. В обоих случаях использовалась склейка из нескольких сканов. В случае с Мини их было ощутимо больше:
Далее я приведу сравнение сканирования Range и Mini на основе сделанных в офисе сканов. Ниже приведена пара сканирования старого системного блока. В обоих случаях использовалась склейка из нескольких сканов. В случае с Мини их было ощутимо больше:
 С одной стороны, очень хорошо видно, что детали на Мини заметно лучше. Но при этом можно увидеть так же и то, что склейка получилась крайне кривой (двойной сидиром, явно не совпадающие по уровням половины нижней части), т.е. её нужно делать в полностью ручном режиме, иначе получится то, что получилось. И это при том, что я весь «фасад» системного блока разрисовал маркерными точками (вы можете их увидеть, как выступающие мелкие бугорки – сканер некорректно видит в них изменения высоты). Также, миник полностью потерял решетку, т.к. она оказалась для него слишком темной. Еще одно сравнение, теперь вблизи. Здесь уже хорошо видны точки (но это мелочь, которую легко убрать), но здесь же у Mini уже хорошо виден «двойной» сидиром, двоение на логотипе внизу и рябь чуть левее него, говорящая о том, что после склейки поверхности оказались на разных уровнях. Также видны тени на некоторых маркерных точках, говорящих о неточности склейки.
С одной стороны, очень хорошо видно, что детали на Мини заметно лучше. Но при этом можно увидеть так же и то, что склейка получилась крайне кривой (двойной сидиром, явно не совпадающие по уровням половины нижней части), т.е. её нужно делать в полностью ручном режиме, иначе получится то, что получилось. И это при том, что я весь «фасад» системного блока разрисовал маркерными точками (вы можете их увидеть, как выступающие мелкие бугорки – сканер некорректно видит в них изменения высоты). Также, миник полностью потерял решетку, т.к. она оказалась для него слишком темной. Еще одно сравнение, теперь вблизи. Здесь уже хорошо видны точки (но это мелочь, которую легко убрать), но здесь же у Mini уже хорошо виден «двойной» сидиром, двоение на логотипе внизу и рябь чуть левее него, говорящая о том, что после склейки поверхности оказались на разных уровнях. Также видны тени на некоторых маркерных точках, говорящих о неточности склейки.
 "Так что, нельзя что ли с миника сделать нормальный скан?". Можно. Но для этого нужно прокачать навык 3L сканирования до 80 уровня. Всё это сделать можно, но потребует значимого объема времени, усилий и знаний в вопросе.
"Так что, нельзя что ли с миника сделать нормальный скан?". Можно. Но для этого нужно прокачать навык 3L сканирования до 80 уровня. Всё это сделать можно, но потребует значимого объема времени, усилий и знаний в вопросе.
Так проект сканирования с Range выглядел в программе:
 Здесь можно увидеть попытку склейки двух частей. Склеить не удалось, т.к. фактически между фрагментами нет достаточного «перехлеста»:
Здесь можно увидеть попытку склейки двух частей. Склеить не удалось, т.к. фактически между фрагментами нет достаточного «перехлеста»:
 Это сравнение мешинга данных с Range в родном софте (справа) и в Cloud Compare (слева):
Это сравнение мешинга данных с Range в родном софте (справа) и в Cloud Compare (слева):
 А это сравнение скана руки, сделанное с помощью Range и Mini:
А это сравнение скана руки, сделанное с помощью Range и Mini:
 «Ну, вообще-то, это почти что разные вселенные. Детализация на Mini несравнимо лучше!». Как я выше и сказал, вы можете получить сканы очень высокого качества на Мини… если сможете. Даже несмотря на то, что на скане с Мини я применил некоторый трюк тем, что рука была расслаблена, что уменьшало вероятность появление «эха» плохого трекинга, но на большом пальце видна лишняя поверхность, плюс за пределами скриншота было уже сильное несовпадение поверхностей на уровне запястья. И, кроме этого, некоторая часть фактуры кожи на самом деле является цифровым шумом – в этом скане не использовалось шумоподавление. Но, всё же, возможности Мини в плане возможностей получения качественного результата отрицать было бы глупо.
«Ну, вообще-то, это почти что разные вселенные. Детализация на Mini несравнимо лучше!». Как я выше и сказал, вы можете получить сканы очень высокого качества на Мини… если сможете. Даже несмотря на то, что на скане с Мини я применил некоторый трюк тем, что рука была расслаблена, что уменьшало вероятность появление «эха» плохого трекинга, но на большом пальце видна лишняя поверхность, плюс за пределами скриншота было уже сильное несовпадение поверхностей на уровне запястья. И, кроме этого, некоторая часть фактуры кожи на самом деле является цифровым шумом – в этом скане не использовалось шумоподавление. Но, всё же, возможности Мини в плане возможностей получения качественного результата отрицать было бы глупо.
Было еще желание сделать скан торпеды авто на Range, но по указанным выше причинам пока не имею возможности.
Есть вещи, которые я вообще не факт, что смогу проверить, например, целесообразность приобретения стабилизатора для сканера – повлияет ли это на стабильность трекинга и снижение вероятности появления двоения на сканах. Про последнее замечу, что некоторое время назад приобрел дешевый трехосевой стаб для телефона с целью попытаться использовать с ним миник, но несмотря на то, что вес сканера небольшой (166 грамм для Mini и 208 для Range), его невозможно было установить хорошо отцентрованным из-за конструкции, в результате чего моторы не справлялись. У самого Ревопоинта есть специально разработанный стабилизатор, но, во-первых, он двухосевой, во-вторых, его вечно нет в наличии, в-третьих, скорее за эти деньги (учитывая, к тому же, стоимость доставки) я попытаюсь достать полновесный трехосевой стаб уровня, например, Hohem iSteady Multi, хотя при этом явно потеряю в удобстве использования. Что стабилизатор продается самим Ревопоинтом (имею ввиду штатный, конечно, а не Hohem), к сожалению, не говорит о том, что он действительно влияет на стабильность трекинга, т.к. люди нередко готовы платить просто за свои ожидания.
Еще одна важная вещь, касаемо сканера Range. Я не могу подтвердить, что если вы отсканируете, допустим, раму автомобиля, пусть даже всю ее оклеив маркерами, что при этом объект получится метрологически точным, а не просто внешне похожим, т.к. из-за дрифта трекинга может нарушиться точность геометрии. Например, рама слегка «согнётся» в одной из плоскостей. Да, такие сканы делаются по частям с последующим совмещением, что уменьшает такую потенциальную погрешность. Но, чтобы было понятно, приведу специально выдуманный пример: допустим, вы сканируете раму автомобиля. Допустим, целиком за один проход. Представьте: вы начали сканирование из переднего правого угла в районе колеса и «пошли» назад. Дошли до края рамы, перешли постепенно на левую сторону и «пошли» вперед. Потом пришли из левой передней стороны в переднюю правую и… не попали в точку старта, потому что за это время всё уже трижды изогнулось и сместилось. Боюсь, такая проблема будет при использовании практически любого сканера, не имеющего «подтверждения» положения в пространстве. Но одни накопят за это «время» 2 см, а не накопит ли Ревопоинт за это «время» все 20, не поручусь. Описанное условие экстремально, на фоне уже зычно кричат «Ага!» суровые сибирские мужики с японской бензопилой. Но, как сказал, какая накопительная погрешность при сканировании там, где даже 5 мм на метр имеет большое значение, я сказать по результатм моих тестов на момент не могу, но на дрифт в 5 мм в Feature Mode на 40 см уже натыкался запросто. Для проверки подобного требуется произвести сканирование с разделением, например, той же рамы авто на несколько сканов, нанеся предварительно достаточное количество маркеров, но это сейчас находится за пределами моих возможностей. Потому пишу, что очень важный момент касаемый качества получаемых сканов находится под вопросом, и подтвердить или опровергнуть его я не могу.
6. Техническая поддержка
Внезапно, я сделал даже отдельный пункт. Существует официальный форум Revopoint (forum.revopoint3d.com), на котором можно задавать появляющиеся в процессе работы вопросы. В случае с Мини они не просто появятся, они появятся в столь обязательной форме, что… пардон, я снова отвлекся. Там можно задать вопросы вида «а как мне, собственно, вот это отсканировать?». И вам там постараются помочь. Модератор форума, некая Pop Up The Volume (PUTV), действительно искренне пытается помочь людям в решении их вопросов. И, скажем прямо, такую честную попытку помочь нечасто встретишь. Да, она фанат Ревопоинта, которая искренне будет защищать любые недостатки устройств компании, но не будем придираться. Важно, что она занимается популяризацией темы сканирования и помогает людям в решении вопросов.
Также, там несколько раз всплывали вопросы уже чисто гарантийного толка. Насколько помню, они вполне решались уже другими представителями компании.
7. Выводы
Вначале, говоря о сканерах Ревопоинт вообще, скажу, что они очень активно начали спускать процесс 3Д сканирования с небес на землю. Т.е. когда в устройстве стоимостью около миллиона рублей, в котором из «стоимости железа плюс всё остальное» эта самая стоимость железа составляет едва ли 50000 рублей, а остальные 950К – это как раз «всё остальное», т.е. чистая наценка… Помните, с чего я начал статью, говоря про уникальные технологии? Так вот как раз такие компании, пусть выпуская и не идеальные устройства, популяризируют тему 3Д сканирования, вынуждая остальные фирмы постепенно снижать цены под разными благовидными предлогами. Т.е. никто не станет сканер за условный миллион внезапно продавать за 50К, но можно будет выпустить какую-то его упрощенную модель за означенную стоимость, а потом выяснится, что модель за миллион и пятьдесят тысяч в общем-то и не отличаются. Понятно, именно так оно не делается, но процесс популяризации, а это читай удешевление конечной цены для потребителя как минимум в разы, уже запущен. И как за 10 лет стоимость фотополимерных 3Д принтеров уменьшилась более чем в 10 раз, так и в случае с 3Д сканерами процесс появления достаточных для конечных пользователей моделей за реальный ценник уже находится на стадии "а вот это уже вполне похоже".
Пара оговорок. Во-первых, не Ревопоинтом единым. Creality тоже активно продвигает бюджетные сканеры, имеющие неплохое качество сканирования. Во-вторых, выше, говоря о «всё остальное», я полностью «проигнорировал» стоимость разработки самого сканера и его программного обеспечения, что некорректно. Нюанс же заключается в том, что железо стоит на каждый экземпляр продукта, а софт и цена разработки железа «распределяется» на все проданные копии. Т.е. если вы планируете продавать «уникальную технологию» в единичных экземплярах, то доля стоимости того же софта в каждом экземпляре будет огромной. Но если вы будете продавать с целью «всем и каждому желающему», то и доля стоимости разработки в пересчете на экземпляр может упасть как бы не в сотни раз. Что и происходит в случае популяризации технологии. По части «популяризации», впрочем, добавляю ещё одно, только со знаком минус: на Али сейчас вполне есть сканеры стоимостью менее 100 долларов. Хорошо, что там есть видео процесса сканирования. По тому, что я там увидел, это размерные макеты сканеров, не имеющие ни малейшего смысла к покупке.
Выводы, касаемо самого Range. Это сканер, который подходит для средне и крупногабаритных (до нескольких метров) объектов. Благодаря тому, что на нём мы имеем широкий угол обзора, трекинг работает вполне успешно, хотя и не совсем без оговорок. Т.е. этот сканер действительно можно уже назвать рабочим, пусть и с поправкой на ограниченную точность. Работа с ним, как и с любым сканером, потребует некоторого освоения темы для получение наилучшего результата, но у него уже нет высоченного порога вхождения (снова привет Мини). К сожалению, пока у меня очень ограниченный опыт работы с ним, потому мои выводы всё равно правильнее назвать предварительными. Но по тому опыту, что у меня с ним пока есть, он оставляет вполне благоприятное впечатление. Да, у него всё равно есть проблемы с трекингом (попробуйте им отсканировать банальную клавиатуру компьютера за один скан), да, у него всё еще невысокая скорость съёмки, заставляющая вас вести сканер, как ёжики рожают. Но в целом сканер хоть и небезпроблемный, но уже рабочий.
Для каких целей может подойти: учитывая, что сам я его пока использовал только для «фотографий тестовых котов», рекомендации будут иметь умозрительный характер. Он вполне должен подходить для сканирования деталей авто, включая даже раму целиком, элементов интерьера, когда не будет требоваться сверхвысокая детализация, декор вроде лепнины или барельефов. Примеры таких сканов уже в неплохом количестве выкладывались на том же форуме Ревопоинта, потому давать такую рекомендацию, даже не делая таких сканов самому, я могу с достаточно чистой совестью. Что ж, надеюсь, вы дочитали до этого места, а, как говорится (точнее, уже не говорится), за сим откланяюсь.
PS: Если посчитаете это актуальным, можете в комментах написать, что бы вы хотели увидеть отсканированным или какие дополнительные тесты провести. Если будет время и возможность, могу попробовать сделать.
Еще больше интересных статей
QIDI MAX 4 спустя полтора месяца. Принтер начал зарабатывать деньги.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Новое поколение SLS принтеров LIDER-3D
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
LIDER-3D.RU совместно с ведущим кит...
Практика использования лазера мощностью 5,5Вт
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.









{kind=link}
Комментарии и вопросы
Не подумывали над масштабом 1:...
Титанический труд
Интересное наблюдение. Может п...
на модели когда принтер печата...
Итак, я захотел поставить новы...
Всем привет. Уверен , что здес...
Не так давно мною был приобрет...